YouTube tutorials I followed
Complete parts and tools list
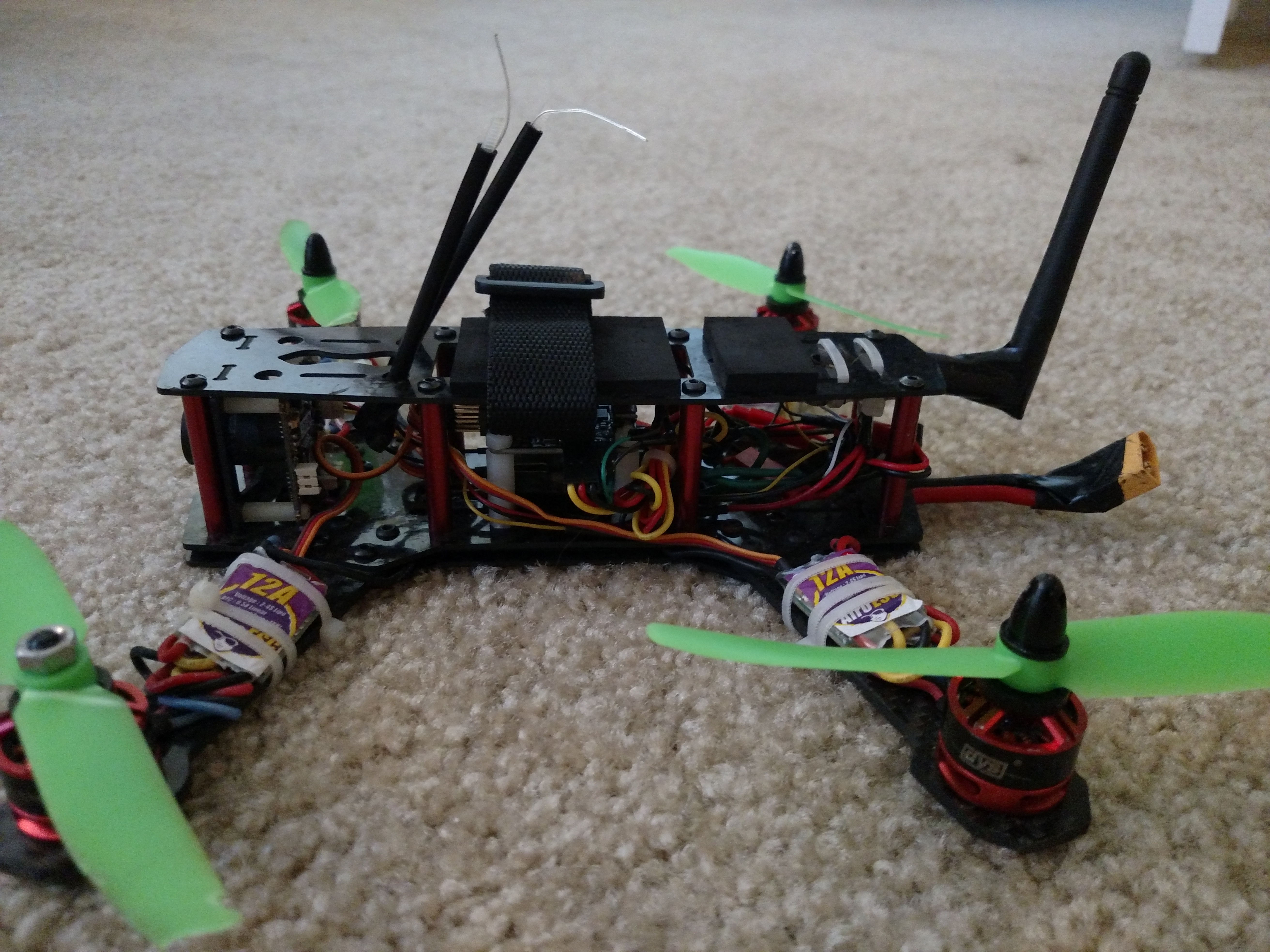
Pictures of finished quadcopter
After seeing some FPV quad racing videos I decided I really wanted to fly one. When I found a step by step YouTube tutorial by RC Model Reviews, and watched it several times through, I decided that even though I had no experience building anything electronic I could do it since the tutorial was so thorough. Although the tutorial included some links, it doesn’t have a comprehensive list of all the parts and tools that are required. This caused me to order some parts I didn’t need, and other parts I had to order last minute after I realized they were needed. So others don’t waste money like I did, I compiled a list of all the parts and tools I ended up needing. I spent about $800 even though it should have costed about $630 plus shipping. You can get everything you need for under $500 if you already have some of the tools, and/or use a less expensive controller. For example, I got the Taranis X9D ($212), but you could get the Taranis QX7 for $120 which would drop the total cost for everything to about $540 – I do not have personal experience with the Taranis QX7, but it’s supposed about the same. If you find cheaper/better parts or tools please comment the links so others can benefit!
After I got most my parts I had a friend teach me the basics of soldering, but from there the tutorial was able to guide me through the whole process. A few times I was frustrated, but I believe this build is completely doable by most people.
I finished the first part of the tutorial before adding FPV and tried to go fly the racing quad line of sight. I crashed it many times, caused some damage, and could have hurt someone. I bought a $17 little toy quad and a $2 protector with extra blades
(highly recommended). This allowed me to practice inside and learn to fly before talking my racing one out. For the safety of your quad, others, and yourself first learn to fly a toy, then learn to fly line of sight, and then learn to fly FPV.
Since the Taranis has telemetry I was also able to add battery warnings with the help of a tutorial by travisgrindal. Note: if you get the pre-soldered flight board like I did you’ll need to cut the JST connector to be shorter to fit on the pins since the standoffs bring it up too close to the top panel.
This quad is great as a first time build since it is tough, easy to build, easy to upgrade, inexpensive, and can handle both 3s (11.v) and 4s (14.8v) batteries.
Happy flying!
Budget build tutorial by RC Model Reviews: https://www.youtube.com/playlist?list=PLgHGpiWXS2eSYeceg736QSESW9mijzuhf
Telemetry and battery warnings setup tutorial by travisgrindal: https://www.youtube.com/watch?v=Q7KpBGDxZQ4
Quadcopter Parts ($231 + shipping):
1 frame – $21 (the triangles go down for stands – super helpful, but mine broke off pretty quickly when I was learning to fly)
http://www.banggood.com/H250-ZMR250-250mm-Carbon-Fiber-Mini-Quadcopter-Multicopter-Frame-Kit-p-933185.html
or
http://www.amazon.com/gp/product/B00WE9EGAA
4 motors – $32 (in the tutorial he cuts the motor and ESC wires, but I decided to avoid the extra soldering by connecting them and bunching them up with zip ties – see pictures)
http://www.banggood.com/DYS-BE1806-2300KV-Brushless-Motor-2-3S-for-Mini-Multicopters-p-933192.html
or
http://hobbyking.com/hobbyking/store/__61433__DYS_BE1806_13_Brushless_Motor_for_Multirotor_2300KV_24g.html
or
http://www.amazon.com/gp/product/B00SR9GH4O
4 ESCs- $40
http://www.hobbyking.com/hobbyking/store/__55241__Afro_ESC_12Amp_Ultra_Lite_Multi_rotor_Motor_Speed_Controller_SimonK_Firmware_Version_3.html
or
http://www.amazon.com/gp/product/B00WFHNFX0
1 flight controller – $23
http://www.banggood.com/Afro-Naze32-10DOF-Rev5-MPU6050-Flight-controller-p-1007113.html
or
http://www.hobbyking.com/hobbyking/store/__68813__AfroFlight_Naze32_Acro_FunFly_Controller_Soldered_version_Horizontal_Pin_.html
or
https://www.amazon.com/gp/product/B01KZIZO0W
1 receiver – $23
http://www.banggood.com/FrSky-D4RII-24G-4CH-ACCST-Telemetry-Receiver-p-929069.html
or
http://www.hobbyking.com/hobbyking/store/__24788__FrSky_D4R_II_4ch_2_4Ghz_ACCST_Receiver_w_telemetry_.html
or
http://www.amazon.com/gp/product/B00SWHWFWO
1 camera 2.8mm – $31 (in the tutorial the SC2000 600TVL Camera was used, but if you use this one instead your quad will be able to support 3s and 4s batteries – the only down side is you can only get 3 of the 4 standoff nuts on)
http://www.banggood.com/RunCam-PZ0420M-L28-2_8MM-864_3M-600TVL-DC-5-17V-Wide-Voltage-Mini-FPV-Camera-p-1017665.html
or
http://www.securitycamera2000.com/products/RunCam-600TVL-DC-5%252d17V-Wide-Voltage-Mini-FPV-Board-Camera.html
or
https://www.amazon.com/gp/product/B01M0P2M2Q
{kind=link}
1 FPV transmitter – $19
http://www.hobbyking.com/hobbyking/store/__63114__SkyZone_TS5823_5_8GHz_32CH_A_V_200mW_Mini_FPV_Transmitter_v2_.html
or
http://www.amazon.com/gp/product/B00VE3QD9O
10 sets of 2 5040 blades – $8 (you only need 2 sets, but you’ll want tons of these)
http://www.banggood.com/6-Pairs-Gemfan-5040-CW-CCW-ABS-Propellers-For-ZMR250-QAV250-280-180-RC-Multirotors-p-1007458.html
or
http://www.hobbyking.com/hobbyking/store/__80963__Gemfan_5040_Multirotor_ABS_Propellers_Bulk_Pack_10_Pairs_CW_CCW_Black_.html
or
https://www.amazon.com/gp/product/B01FMY0F4O
3 female XT60 connectors – $2
http://www.banggood.com/Amass-XT60-MaleFemale-Bullet-Connector-Plugs-For-RC-Lipo-Battery-p-929670.html
or
http://www.hobbyking.com/hobbyking/store/__10414__Male_XT60_connectors_5pcs_bag_GENUINE.html
or
http://www.amazon.com/gp/product/B00W6AUSYU
10 JST connections – $3
http://www.banggood.com/Wholesale-10-Pairs-15cm-JST-Connector-Plug-With-Connect-Cable-For-RC-BEC-ESC-Battery-p-50810.html
or
https://www.amazon.com/gp/product/B00E7MXA2W
M2 and M3 standoffs – $12 (M2 standoffs for camera and M3 for the flight controller)
http://www.amazon.com/gp/product/B017QE9OU4
or
http://www.banggood.com/140pcs-M2-Nylon-Hex-Spacers-Screw-Nut-Assortment-Stand-off-Accessories-Kit-Set-p-996104.html
and
http://www.banggood.com/88pcs-M3-Nylon-Black-M-F-Hex-Spacers-Screw-Nut-Assortment-Kit-p-947169.html
1 meter of silicone wire – $1 (I found it helpful to get both red and black)
http://www.banggood.com/2M-AWG-Soft-Silicone-Flexible-Wire-Cable-12-20-AWG-1-Meter-Red-1-Meter-Black-p-985529.html
or
http://www.hobbyking.com/hobbyking/store/__78196__Turnigy_High_Quality_16AWG_Silicone_Wire_1m_Black_.html
or
http://www.amazon.com/gp/product/B0077E92C4
1 meter of LED lights – $3 (not required, but recommended – 1 meter is way more than needed)
http://www.banggood.com/5M-300-LEDs-SMD-3528-Flexible-LED-Strip-Light-Non-Waterproof-DC-12V-p-922277.html
or
http://www.hobbyking.com/hobbyking/store/__8941__Turnigy_High_Density_R_C_LED_Flexible_Strip_Red_1mtr_.html
or
https://www.amazon.com/gp/product/B01FHEJ3V0
1 set of 4 velcro – $3
http://www.hobbyking.com/hobbyking/store/__74090__Polyester_Velcro_Peel_n_stick_Black_1_Meter_.html
or
http://www.amazon.com/VELCRO-Sticky-Back-Strips-Black/dp/B000TGSPV6
Heat shrink – $5
http://www.banggood.com/328pcs-21-Polyolefin-Heat-Shrink-Tube-Sleeving-5-Color-8-Size-p-969574.html
or
http://www.amazon.com/Anytime-Tools-Shrink-Sleeve-Assorted/dp/B008WWC6FU
1 copper pcb to use as power distribution board – $3 (I did not use, but I wish I did since it would have things easier than soldering all the wires together)
http://www.amazon.com/Water-Single-Copper-Laminate-Circuit/dp/B00P26EQNE
1 battery strap – $2 (I made my own, but I would recommend buying one since my battery comes off on hard crashes)
http://www.banggood.com/Nylon-Velcro-Lipo-Battery-2cm30cm-Ribbon-Fastener-Magic-Sticker-Strap-p-922923.html
or
http://www.hobbyking.com/hobbyking/store/__90954__Scorpion_Locking_Velcro_Battery_Strap_Set.html
or
https://www.amazon.com/gp/product/B01ANOKKTS
Accessories ($322 + shipping):
2 batteries – $31 (one for Goggles and one for the quad – you’ll probably want more of these – the battery for the Googles needs to be 3s, but the quad can handle 3s or 4s)
http://www.hobbyking.com/hobbyking/store/__18207__Turnigy_nano_tech_1300mAh_3S_45_90C_Lipo_Pack.html
or
http://www.amazon.com/gp/product/B00TDH7WB6
1 battery charger – $27 (you also need to buy a connector for XT60 or cut the wires and solder on a XT60 connector like I did – XT60 connectors already listed above)
http://www.hobbyking.com/hobbyking/store/__58315__Turnigy_P405_Dual_Input_AC_DC_45W_Digital_Balancing_Charger_.html
1 controller – $207 (a cheeper alternative would the Taranis Q X7)
http://www.banggood.com/FrSky-2_4G-ACCST-Taranis-X9D-Plus-Transmitter-p-940819.html
or
http://www.hobbyking.com/hobbyking/store/__67750__FrSky_2_4GHz_ACCST_TARANIS_X9D_PLUS_Digital_Telemetry_Radio_System_Mode_2_.html
or
https://www.amazon.com/gp/product/B014IYV8TK
1 controller charger – $7 (if the one you choose doesn’t come with one)
http://www.hobbyking.com/hobbyking/store/__45031__FrSky_AC_DC_Charge_Adapter_US_Version.html
or
http://www.amazon.com/gp/product/B010HDI4QG
1 goggles – $32 (these are the first ones I used and they work ok, but I would recommend the Quanum v2 Goggles)
http://www.hobbyking.com/hobbyking/store/__53706__Quanum_DIY_FPV_Goggle_Set_with_Monitor_KIT_.html
or
http://www.amazon.com/gp/product/B00YPZ9N4A
1 FPV receiver – $17
http://www.hobbyking.com/hobbyking/store/__15415__SkyZone_RC305_5_8Ghz_8_Channel_AV_Receiver.html
or
https://www.amazon.com/gp/product/B00OZQYGSW
1 male to male RCA cable/connector – $1 (the goggles and FPV receiver both have female RCA video cables so you’ll need a way to connect them – I made my own male to male connection, but the one linked should work)
http://www.banggood.com/Male-to-Male-RCA-Phono-Coupler-AV-Audio-Adapter-Connector-Nickel-p-968256.html
or
http://www.hobbyking.com/hobbyking/store/__34746__RCA_Male_to_RCA_Male_A_V_Coupler_Adaptor_3pc_.html
or
http://www.amazon.com/Pieces-Male-Coupler-Connector-Adapter/dp/B007PQ0K1G
You’ll also need to solder a XT60 connector that goes to 2 JST connections (both already listed above) so your screen and your receiver share the same battery- see pictures (they don’t necessarily have to share the same battery, but they need to share the same ground wire)
I would also recommend getting a Lipo Battery Tester Monitor Low Voltage Buzzer, but it isn’t required. This will make it easy to check the voltage of your battery and individual cells without connecting it to the charger. Also, if don’t set up telemetry you can mounted this to your quad so you have a battery warning buzzer to help you avoid damaging your lipo batteries by running them too low.
Tools ($76 + shipping):
1 knife – $7
http://www.amazon.com/gp/product/B006962HWI
1 soldering iron – $8
https://www.amazon.com/gp/product/B0006NGZK0
Soldering wire – $2
http://www.banggood.com/0_8mm-Soldering-Wire-60-40-Tin-Resin-Flux-Dispenser-Tube-Rosin-Core-Solder-p-990164.html
or
http://www.amazon.com/gp/product/B008OSBBI0
Zip ties – $2 (I used tons of these)
http://www.hobbyking.com/hobbyking/store/__17570__Cable_Ties_160_x_2_5mm_White_100pcs_.html
or
http://www.amazon.com/gp/product/B00L2LGMO4
Loctite – $8
http://www.amazon.com/Loctite-1363589-4-Gram-Control-Adhesive/dp/B003Y49R7G
Metric allen keys – $15 (I already had these)
http://www.amazon.com/TEKTON-25253-Hex-Wrench-30-Piece/dp/B00I5TH074
Wrench – $10 (socket wrench would be better, but a wrench works – I already had one and a socket wrench set)
https://www.amazon.com/gp/product/B00002N5L0
Electrical tape – $8 (I used electrical tape from HomeDepot, but many people have recommended liquid electrical tape)
http://www.amazon.com/Star-brite-Liquid-Electrical-Tape/dp/B000XBDK7G
Wire cutters – $11 (not needed since you have the knife, but they will make things easier – I already had some)
http://www.amazon.com/Rapala-7-Inch-Side-Cutter/dp/B0015NBL0E
Android cable – $5 (for connecting the flight board to your computer – I already had one)
http://www.amazon.com/Micro-Charge-Techoland-Enhance-Experience/dp/B00W1VC2TS
Computer – I’m going to assume you have one (needed for running base flight)
Pictures:
Goggles and FPV receiver

Quadcopter



I put together a list of backup parts you should consider getting in this blog post: http://copterwars.com/blog/?p=148
If you want to read about the upgrades I made over the first 6 months of regularly flying this build checkout this blog post:
http://copterwars.com/blog/?p=56
Thanks so much for posting this, it is very helpful, but is hard to find. The only way I found it was from your comment on YouTube.
metoo
same
hi this was great – i too watched rc models videos and decided i wanted to build my own quad i have experience flying them but never a build – i figured if i follow rc models video i could most likely do it – my question is i dont want to make it fpv – for now being my first one i just want it simple as can be – upon reading ur list of needed parts im a little confused if i need it or if its neccasry just for the fpv
i know the basics – board -esc – motors – props – frame –
extra things could you help me as to what is necessary for the build without doing fpv thank you very much
If you want to fly without FPV you’ll need everything except:
-camera
-fpv transmitter
-fpv receiver
-goggles
-M2 standoffs
-male to male RCA cable/connector
Do we need additional equipment to do the binding? It looked like he used a Zippy 1100, switch and connector. I didn’t see those on your list. Did you use them? Of the whole tutorial the binding process is the most confusing for me.
The binding process was a little confusing. I bought these things, but I didn’t end up using them since unplugging and plugging back in the battery was simple enough.
thanks so much but it would have been better if some of the parts from amazon were shipped to Australia.
NZ the same…
Thanx for the details!
how’s the FPV ? do you receive a clear image with no interfering ?
you know! those black and white lines that shows on the monitor .
For the most part there is little to no interference for close range, but as you get near the max range of the fpv transmitter/receiver or go behind objects the interference increases fast. For Christmas I am getting stuff to record what is being displayed on the goggles, so hopefully I’ll be able to upload an example soon.
What kind of battary should i use for this drone! also for the FPV receiver and goggles?
For both I use a 1300mAh 3S 45~90C (link is under Accessories).
For the drone I’ve experimented with 1500mAH 4S batteries and it seemed to work fine, but I haven’t done too much because I’m afraid it might fry something. I’ve also used a 2200mAH 3S and only got a few extra minutes of flight time and the weight made it feel a little sluggish, so I don’t recommend. I recently ordered a 1500mAH 3S to experiment with, but it hasn’t arrived yet.
For the goggles and receiver I’ve always powered using the same battery (you can see my set up under Pictures). I’ve used a 1000mAH 2S for this as well and it worked fine. Really any 2S or 3S battery should work fine for the goggles and receiver.
What do you mean by close range? is long range up in the clouds?
I see some of these things go out like 10 miles. this one is 5.8Ghz so I assume the controller can operate the device much further than the camera can send a signal back.
How far out can you go with this Camera before the signal craps out on a clear day?
Thanks!
One of the biggest determining factor of range is the type of antenna. With the antenna that comes with the video transmitter and receiver you’ll probably max out the range at 300m (rough estimate from my experience) in all directions without obstacles. The controller has a much further range and can operate up to a few miles. With a directional or helical antenna you can get a much further range, but only in a certain direction. You don’t want to put a directional antenna on the quad since it constantly changes the direction it points, but you could put one on your receiver, however most fpv racing pilots prefer the cloverleaf or mushroom antenna so they can fly all around and have good reception close by. A way to get the best of both worlds is to use a diversity receiver (I just got mine yesterday!). A diversity receiver has two antennas and takes the best of the two receptions. This allows you to have a directional or helical antenna and a cloverleaf or mushroom antenna so you can get a great picture flying anywhere close to you, but you can go out a far distance in the direction the antenna is pointed. I just got my new receiver and new antennas so I plan to test it out this weekend. If it goes well I plan to do a blog post on the topic.
Nice, and thanks for the reply. Can you link the Bi Directional remote you referring too? I also purchased the XD9 it should get her tomorrow.
SO, if I understand correctly the Picture strength and Quad both drop off at about 300M unless you set up with the better antenna for both the receiver and the video signal.
You mean diversity receiver? I’m not aware of a Bi Directional remote.
http://www.quadrysteria.com/store/p297/40-Channel_with_Race_Band_FR632_Auto_Scan_Diversity_5.8GHz%C2%A0A%2FV_Receiver_with_LCD.html
300M was just a rough estimate. The quad will be able to go much further, but the picture will start getting staticky the further out you go and at about 300M it will completely drop off.
Thanks again for all of you feedback and information. I am now flying FPV and its great! Wish i had stumbled on your blog sooner. I have also provided it to some others interested in building Quads.
Just an up update, I am now flying and recording thanks to you and rc models. I waS looking for your flight videos.
https://m.youtube.com/watch?v=a0X-r79gr0c#
I have not bought a camera for recording videos yet, but I’ve done a couple DVRs recordings of my flights.
This one was from a few months ago: https://www.youtube.com/watch?v=mY_u9kJUWd0
Are the prices shown u.s. dollars? I’m in nz. Cheers
Yes, they are U.S. dollars at the time I bought the parts, so they may have changed slightly since then.
I just wanted to say thanks for this thorough parts list. It’s just what I was looking for to accompany RC Model Reviews low cost build tutorials. Really saves time and hassle down the road.
Thank you for this update. I have started buying some of the pieces and was looking for the complete list. One question though; would you do it again? Would you buy or build? Thanks for any input.
YES!
I would definitely build again. I recently bought a lighter 250 that is more suited for 4s off craigslist, but after a hard crash I had to completely take it apart to repair it. If I didn’t have the experience from my first build I would have never been able to repair it. It was way more difficult to repair than the repairs I did on my original quad because some things were put together differently than I expected.
Hi,
I’m building this copter and was wondering which remote controllers work with this reciever?
I used the Taranis which works well with it, but also the Turnigy 9x should work as well. If you go with this transmitter (remote controller) I’m sure others would like to know how it worked out. Check out: https://pixhawk.org/peripherals/radio-control/turnigy_9x_frsky_mod
The other really popular transmitter brand is Spectrum, but you would need to use a Spectrum receiver if you want to use one of those transmitters.
Do you need to mod the Turnigy 9x transmitter in order to use the Frsky receiver you listed in the parts list above?
Instead of using the Frsky receiver could you just use the turnigy receiver that comes with the box as the receiver for the drone?
what are the differences?
sorry for these questions, I am a noob at this type of stuff.
If you use the Turnigy 9x transmitter you can use the turnigy receiver instead of the Frsky one I listed or you can mod the Turnigy 9x transmitter. Either way should work.
I haven’t done either one, so I’m not aware of the differences.
Great, thanks for the helpful advice. I ordered all the material on Bang good. I will start building my first drone and return here if it works. Then I will let you have my parts list. Greetings from Amsterdam
That would be great. I think others would like to see a list that could be bought all from the place.
Just a heads up that the link text for the Naze32 shows for the horizontal pins while the actual link goes to the vertical pins.
Thanks! I just fixed it.
Thank you for all the info, it’s was really useful
Hello,
How can I test the motors before installation for a mini Quad 250?
I tried to connect the ESC + cc3d + motor powered by 11.7V battery using the Open pilot software to run it .
But the ESC gets hot and nothing happens !
i know im doing something wrong , can anyone please tell me how to do that! pix of a link to a video will be awesome.
thanx
Can you upload a picture of your set up and post a link to the image?
Hi
Thank you for your webpage it is very helpful.
I am a RC plane pilot and keen to try quadcopters.
What limitations will I face if I use my existing RX/TX gear? I have a Spektrum DX6i
Thanks
I have a couple friends who use Spektrum.
You won’t be able to set up telemetry, but other than that I can’t think of any other limitations.
Simply use your Spektrum receiver instead of the FrSky receiver I linked.
Hi there, I want to control drone via android tablet instead of taranis controller. Is that possible?
I’m sure it is possible, but I haven’t done enough research into a set up like that so I don’t know what would be required.
I got all the way through the process but am stuck at setting up the Naze with Baseflight. The problem is there is no finalized driver that works with Windows 10. The guys at Silabs sent me a temporary driver. It loads successfully but still doesn’t allow me to connect to Baseflight. I know my usb connection is ok since the light is on the Naze.
Any suggestions of how to resolve this? It doesn’t look like the finalized Win10 driver will be available for sometime. Silabs has been saying it will be ready in a week but they’ve been saying that since last summer!
Do these drivers work?
https://www.silabs.com/products/mcu/Pages/USBtoUARTBridgeVCPDrivers.aspx
Another other option would be to use Cleanflight. It’s a little more work to set up, but like it better than Baseflight.
https://chrome.google.com/webstore/detail/cleanflight-configurator/enacoimjcgeinfnnnpajinjgmkahmfgb
Thanks! They just released the finalized win10 driver yesterday.
Glad you got it working!
Was the link I provided the correct one? If not, can you please add a link to the drivers you used in a comment for others that may run into the same problem?
This is the link I used:
http://www.silabs.com/products/mcu/Pages/USBtoUARTBridgeVCPDrivers.aspx
Thanks!
You mentioned that you made your own XT60 to Deans converter to plug your battery into the charger but how did you connect the battery to the balancing port of the charger? The pins on the Nano-tech 1300 battery don’t seem to line up with the Balance Port of the P405.
The P405 should have come with Balance lead and Balance board. You plug the Balance lead into the charger and the Balance board and then plug the battery balance plug into the Balance board.
Here’s a picture: http://imgur.com/CTD4ruK
Here’s what the description on HobbyKing says it includes:
P405 Charger
Charging lead
Balance lead (JST XH)
Instruction Manual
Balance board and lead
Thank you, kind sir.
Taranis is 169 at the moment on banggood with a promo code, check out the following link for info:
https://www.reddit.com/r/Multicopter/comments/44hav0/banggood_deal_on_taranis_x9d/
When I charge with the P405 I get the following error message:
ERR.5 (Some type of electronic interruption or malfunction occured). That is pretty vague. Has anybody else received the same message?
Are there any resources to help troubleshoot this problem? The manual certainly doesn’t help.
Did you plug in both the balance plug and the xt60?
Did the lipo battery get over drained?
Yes, I plugged in both the balance and the xt60. I don’t think the lipo battery was over drained. I had only used it to calibrate the ESCs, etc…when setting up baseflight. I hadn’t flown it yet. I wonder if it’s my power source. I just plugged the P405 into the wall socket but it has a surge protector. Maybe that is causing the problem. I will try using my car battery as a power source instead.
That seems really odd. Mine works just fine plugged into the wall, but I don’t have surge protectors. Can you check the voltage on the battery or the individual cells? Have you tried a different battery?
All my motors work but when I increase the throttle it does not lift off. If I increase it a lot more it flips over. I calibrated the ESCs and put it into the Naze correctly.
Could it be that I have the propellers on wrong? In the build video he did not seem to suggest there was a correct direction in which to put them on (he did not even show putting them on).
I made the same mistake when I first did the build. There are two types of propellers CW and CCW. Make sure you have CW and CCW propellers in the correct spot. Note: flipping the prop over does not change it’s direction.
This is where you put each propeller: http://www.unmannedtech.co.uk/uploads/6/7/0/2/6702064/6624536_orig.jpg
To figure out if a prop is CW or CCW place the prop on the a flat surface the same way you would put it on the quad copter and so the tips go from left to right (or east to west). Look at the right side of the blade and if the side facing you is flat against the surface, then it’s a CCW prop. And vice versa, if you look at the right side and the part that is facing you is off the surface then it’s a CW prop.
Thanks so much! I’m impressed you figured all this out on your own because the build videos, as good as they are, are lacking in a lot of important information.
Looks like you figured it out already but another common issue is the direction you installed the Naze32. When you plug it in make sure the calibration is moving in the right directions and the front of the Quad on the program is actually the front for you in real life!
I had a fried push this in backwards so it calibrated in revers flipping upside down and doing crazy stuff, a few props later found out it was the reason not just the CCW and CW props.
In the build video he hooks up the camera to a controller to set it up. I didn’t have a controller with my camera or goggles. Is that purchased separately? Thanks
Which camera did you get? The ones I linked come with a controller. It looks different than the one he used in the video (http://www.securitycamera2000.com/CCTV/PZ0420H/PZ0420H-4-FPV-Camera.jpg), but it works pretty much the same way. Note: this step isn’t completely necessary since the defaults on the camera are pretty good.
I bought the RunCam 600TVL from your link. Hopefully, it works out without the controller.
Who did you buy it from? All the 600TVL cameras I bought (2 from Amazon and 1 from SecurityCamera2000) have come with a little controller.
From Amazon you can see the controller in the 5th and 6th picture and it says it’s included “1 X OSD Menu”.
On SecurityCamera2000 under details it says “The newly designed 5D-OSD button makes the control easier than OSD board” and shows a picture of the controller.
I would contact whoever you bought the camera from because it’s supposed to be included.
Thanks for the list! The videos and this are a great place to start.
I finally got my quadcopter in the air (thanks in large part to your help). As I’m learning to fly I end up with some pretty hard landings and the props come off. The props are easy enough to find in the grass but the nuts that hold the props on go flying pretty far and they are so small it is difficult to find them.
Do you use loctite on the props (I thought I shouldn’t in case I need to take them off to re-calibrate escs or some other reason) or is there another way to prevent them from coming off on impact?
Is it possible to buy a large number of spare nuts? I haven’t seen them sold independently of the motors.
Thanks!
The motor nuts don’t work great, but I don’t use loctite, instead I use lock nuts which work much better.
I talk about Motor Caps and Lock Nuts in this blog post under the props section: http://copterwars.com/blog/?p=56
first of all this blog post is awesome and have already passed it along to a number of friends.
I’m getting ready to order all of my parts but noticed there is now a naze32 rev6 (updated from the rev5) and is only a couple dollars more. would this be a wise upgrade or does it matter?
also will the vertical pin version of the controller work with the zmr250 frame or does it have to be the horizontal version?
thanks!
It shouldn’t make too much of a difference whether you get the rev6 or rev5 of the naze32. The wiring will be a little different for the rev6, but the rev6 is slightly better (see: http://blog.oscarliang.net/new-naze32-rev6-upgrade-of-rev5/). Another thing to consider is there have been issues with the rev6 and there are now multiple versions of the rev6 so make sure you get one that’s fixed (see: http://www.rcgroups.com/forums/showthread.php?t=2558505).
I got the one from HobbyKing with the receiver and ESC pins out the sides, but the telemetry pins were vertical. The vertical pins fit in the frame, but there wasn’t room to connect jst plugs on to them. I ended up bending the vertical pins to wire up my telemetry. Bending them was fine for telemetry, but I wouldn’t recommend doing that for the ESC or receiver pins. Another option would be to put the receiver in a different place (not under the flight controller) and use shorter standoffs for mounting the flight controller. Using the shorter standoffs should open up enough space to use the vertical pins.
Just a question, I notice the Taranis controller amazon link you put up comes with a receiver. Would buying from amazon eliminate the need to buy the separate receiver? thanks.
Yes. You don’t need 2 receivers.
IS there a way I can use the turnigy9x with the frsky d4r-ii RX?
Yes, but it requires following this mod: https://pixhawk.org/peripherals/radio-control/turnigy_9x_frsky_mod
How were you able to set the aux 1 channel to the top right toggle switch on the taranis? Like what we see in part 4 of the video when Bruce is showing us the baseflight receiver setup?
You have to set it up in the mixer before baseflight will recognize it. Watch: https://www.youtube.com/watch?v=tHjkWXYTMYI
Thank you so much. I can truly say if it wasn’t for your site. Making this quad would have been more challenging. Thanks for all the write ups and tips!
Now gotta figure out how to tune the quad.
Sorry for my lack of knowledge, but what real difference do the ESC’s make? You said doing it again, you would use the Little bee’s, but why? What makes them better?
Great article, by the way. Thank you so much for taking the time to write it up.
DYS BE1806 motors there won’t any difference between the Afro ESCs and the Little Bee ESCs unless you run 5045 tri-blades on 4s which shouldn’t be run on those motors anyways. However, since the Little Bees can handle up to 20A instead of 12A this would allow you to upgrade to bigger motors in the future without getting new ESCs. I wish I would have got the Little Bees because they are rated to handle more amps, lighter, smaller, and nearly the same price as the Afro ESCs.
If you do plan on upgrading to really powerful motors (Emax RS2205-2300 for example: http://www.banggood.com/4X-Emax-RS2205-2300-Racing-Edition-CWCCW-Motor-For-FPV-Multicopter-p-1032857.html?p=VG23011813986201506K) you may even want to consider the 30A version of the little bees (http://www.banggood.com/4X-FVT-LittleBee-30A-ESC-2-6S-BLHeli-Supports-OneShot125-For-RC-Multirotors-p-1031943.html?p=VG23011813986201506K), however these ESCs are also larger, heavier, and more expensive. See: http://fvt-littlebee.com/
Awesome, thank you.
I realized another difference between the Little Bees and the Afro ESCs. The Afro ESCs have a built in 5v BEC which is used to power the flight controller, so if you get the Little Bees you’ll need to get one stand alone 5v BEC to regulate power for your flight controller.
Like many of the other commenters, I researched quads for quite some time before finding this page, which has turned out to be my greatest asset. Thanks for putting this together.
Would it be possible for you to share your PID values? It would give us a good baseline for tuning.
I am no longer using BaseFlight, but the default values were pretty good. I am now using CleanFlight/BetaFlight and those defaults work fairly well too. The defaults will be a much better baseline than the values I use. Even between different versions of CleanFlight you sometimes have to re-tune, but the defaults are adjusted from version to version to handle this.
Thanks!! I’m on clean flight as well and when I hover 5 inches off the ground it oscillates a bit (my throttle is on the left joystick or mode 1). It also drops rapidly if the throttle is decreased just a bit. So I was just wondering what settings you had. I’ll revert back to the default cleanflight settings and gonfrom there.
Excellent blog. Learn a lot from it. I want to build a quadcopter with my 13 yr son and would like to have GPS so he can use GPS features such PH (Position Hold), FailSafe RTH (Return To Home), Assist Take Off\Landing…..
Do you know what need to add GPS to the Quad? Change Flight Controller?
I have not added GPS to any of my quads, but it should be possible with this flight controller.
You might find this helpful: http://www.multi-rotor.co.uk/index.php?topic=9950.0
Have you thought about upgrading the naze to one that has magnetometer and barometer?
I have thought about it, but have not bought one yet. Although neither of those things are very helpful for racing, I think having altitude hold would be very cool. I also want a flight controller that has storage as well so I can log flight data. You can actually solder on storage to the naze, but I’m scared I will fry the board.
So it happened:(. I took it out to my brothers house up on a hill and before I knew it the drone had gone way to far for line of sight flying and I lost orientation to get it back. I dropped it but don’t know where or which house.
I’m going to make another one and wanted to know if you would make it again which parts would you use? I’m going to use the naze 32 Rev 6 full flight board and use sbus instead of ppm.
I’m sorry to hear this. It’s amazing how fast things can go wrong. Personally I would put some 30A ESC and Emax RS2205-2300 Racing Edition motors, but I would only recommend this if you have several months of racing experience already.
You might think building next copter with GPS so that you can use return to home and other gps features.
Good idea. I’m changing things up a bit this time around.
going with:
Lisam LS-210 frame
DYS XM20A ESCs
Same motors
Naze32 rev6c Full feature
same frsky receiver
will look into the GPS as well.
Yo man, thanks a lot for this guide! A lot of people have put guides together, but they leave out the extra stuff to buy like standoffs, heat shrink, etc. I was looking for a guide with specifically that stuff included and yours was perfect.
Thanks-a-mundo for the post.Thanks Again.
I’m think about jumping into this hobby. Would you still recommend going this route for the build for a beginner? I have the same sort of skill set you had when you wrote this (no soldering experience, etc). I have a parts list laid out, but it’s pushing $1k+ because I have name brand components in it. Not sure if I should go the expensive route or do a build like this and maybe spend the extra money on some fat shark goggles or save for another build afterwards. Have any input?
Also how fast is the quad you made? I watched some of your Youtube videos and it seems a bit slower compared to some other videos I’ve seen of other quads. It could just be hard to tell from DVR footage.
I would still recommend this route for a beginner, unless you have someone that can mentor you, because it’s hard to figure out everything on your own.
I have tried fatsharks and personally do not find the experience any better than on my quanum V2s, so I don’t plan to upgrade my goggles anytime soon. Goggles really come down to personal preference, the more expensive option will not necessarily offer the best experience for you. The FR632 receiver is totally worth getting the first time though, even guys with fatsharsk usually get one to use in their ground station.
The speed you can fly the quad is heavily determined by camera angle. Since doing the DRV videos I put out I have significantly increased the camera angle and it now flies a good amount faster. With that said, it is not going to be as fast a lighter build with stronger motors. To me this quad was more than fast enough for the first year of flying, but I was really into the racing aspect of percession flying through the gates. If you want something that will just rocket across a park you will want to get at least 20A ESCs and 22xx motors. The build is sturdy, but it’s also fairly heavy. If you want something really fast you need to bring down the weight, but for a first quad I’m glad a got something more sturdy since I crashed a ton. Smaller lighter builds are also much harder to build, so I’m glad a started with a good beater before trying to build an optimized quad.
Hi. I am about to make this drone, and I was wondering if it was possible to record the video?
You can DVR the live video as I did in this tutorial: http://copterwars.com/blog/?p=64
If you want a high quality recording you’ll need to mount a second camera such as a Mobius, Yi, or GoPro. Most of the FPV racing videos you see online are from a recording camera, not an fpv camera.